技术分享
了解最新公司动态及行业资讯
基于数据融合的 ADS - B /ACARS 空域监视系统设计
摘 要: 研究了广播式自动相关监视( ADS-B) 与飞机通信寻址报告系统( ACARS) 两种数据链路的优缺点; 提出了以 ADS-B 监视为主,将两种数据链路数据融合的思想。研究数据融合算法,构建数据融合模型,并编程实现了 ADS-B/ ACARS 组合空域监视软件。现场运行证明,系统增大了多源监视范围、丰富了监视信息、提高了监视精度。
关键词: 空域监视; 数据融合; 广播式自动相关监视; 飞机通信寻址报告系统
Design of Airspace Surveillance System Based on Data Fusion ADS-B/ACARS ZHANG Zhao-yue,HAN Bang-cun,GAO Chun-yan ( College of Air Traffic Management,Civil Aviation University of China,Tianjin 300300,China) Abstract: Research on the Automatic Dependent Surveillance-Broadcast ( ADS-B) and Aircraft communication addressing and reporting system ( ACARS) advantages and disadvantages of the two kinds of data link in this paper; put forward the thought of fusing the two kinds of the data link based ADS-B. This paper uses the data fusion algorithm to construct the data fusion model and programmed the airspace surveillance software based on the combination of ADS- B and ACARS. Field operation proved that the system increases the multi-source monitoring range,enriching the monitoring information and improves the monitoring accuracy.
Key words: airspace surveillance; data fusion; ADS-B; ACARS
引言
空域监视系统是民航实施空中交通管制、保障航 空运输安全高效有序运行的核心系统[1]。ADS - B ( Automatic Dependant Surveillance Broadcast,自动广播 相关监视) 是依靠 GNSS( 全球导航卫星系统) 来确定 空中飞行目标的精确位置及航行参数,是未来空域监 视系统的发展方向。ADS- B 信息具有更新速度快的 特点,但不包含飞行计划信息、气象信息、发动机状态 等 信 息。ACARS ( Aircraft Communication Addressing and Reporting System,飞机通信寻址报告系统) 同样作 为空域监视的手段,具有信息丰富的特点,但存在报文 更新比较慢的问题。目前国内外研究雷达与 ADS- B 信息融合处理的较多[2 - 6],尚未将 ACARS 与 ADS- B 进行融合。将 ACARS 融合到空域监视中,对有效、全 面地掌握飞机信息有重要意义。
本文针对 ADS- B /ACARS 目前存在的问题,基于 数据融合的思想,采用 ADS- B /ACARS 进行组合空域 监视。在 ADS-B 短时间丢点严重、信息不足时,融合 ACARS 数据,确保监视的连续性、丰富性。ADS- B / ACARS 组合空域监视系统有利于提高监视的时空覆 盖能力,有利于用户掌握当前空域飞机更全面的信息, 能够为民航单位及科研人员提供数据支持。
1 系统总体设计
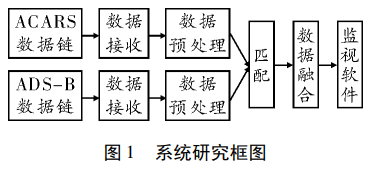
ADS-B /ACARS 组合空域监视系统主要从量测融 合与航迹融合的角度进行了设计。对数据预处理,从 飞行目标的具体数据出发,研究数据之间的相关性从而进行数据的融合。具体包括 ADS-B /ACARS 数据链 路研究、数据接收、数据预处理、数据匹配算法、监视软 件设计等方面的研究。研究框图如图 1 所示。
2 ADS-B/ACARS 数据链路
2. 1 ADS-B 数据链路
ADS- B 是空中和场面航空器或车辆的一项监视 技术,它以先进的地空、空空数据链为通信手段,以先 进的导航系统及其他机载设备产生的信息为数据源, 通过对外发送自身的状态参数,并接收其他飞机的广 播信息,达到飞机间的相互感知,进而实现对周边空域 交通状况全面、详细的了解。应用 ADS- B 技术,能够 更好地利用空域,降低高度和能见度的限制,提高场面 监测能力,增强航空安全[7]。
目前 ADS- B 数据链技术有三种: 1090ES( 1 090 MHz Extended Squitter) ,UAT( Universal Access Transceiver) ,VDL 4 ( Very High Frequency Data Link Mode 4) [7]。其中,1090ES 数据链技术是国际民航组织推荐 的应用于商业运输的 ADS- B 技术。它基于 S 模式数 据链,能够提供的最大数据带宽为 1 Mb /s,可提供航 空器的航班号、ICAO 地址码、位置、高度、速度、航向、 飞行意图等相关丰富的信息。ADS- B 监视信息的更 新频率是雷达的 4 ~ 5 倍,成本却是雷达系统的十分之 一,本文主要针对 1090ES 数据链进行研究。
通过现有 1090ES 地面接收机监视航迹,发现由于 接收机误差、数据链误差、系统延时等误差的存在[8], 飞机飞行过程中的航迹异常、丢点现象比较突出,有效 补充丢点信息对空域监视有重要意义。基于此,本文 提出了应用丰富的 ACARS 数据信息去弥补ADS-B信 息的不足。
2. 2 ACARS 数据链路研究
ACARS 是通过飞机的甚高频通信系统( VHF) 实 现空地之间的数据和信息的自动传输交换的。我国民 航已从 2005 年起,要求 100 座以上的飞机必须强制安 装并使用 ACARS 系统[9]。凭借丰富的数据信息,通 过 ACARS 系统可以有效实现对航空器远距离位置监 控,便于及早发现飞行冲突,合理调配空中交通流量, 保证在更大范围内规划空中交通流,在保障运输量增 长的同时,减少航班延误[10]。
虽然 ACARS 信息丰富,但是 ACARS 的报文信息 更新比较慢,制约了 ACARS 在航空中的应用。为此提 出了将其作为空域监视的辅助手段来丰富监视数据的 信息。
2. 3 两种数据链路比较分析
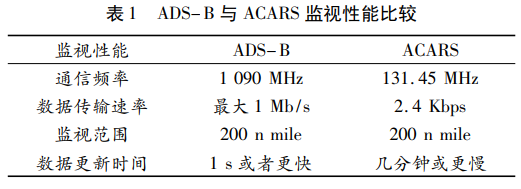
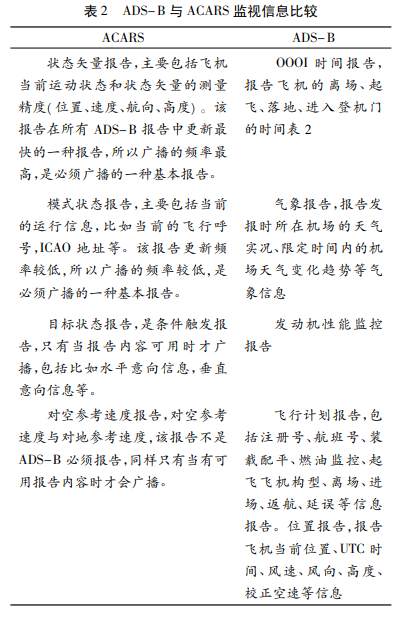
通过研究两种数据链的特性,总结了 ADS- B 与ACARS 报文特点,如表 1 和表 2 分别列出了两种数据 链路的监视性能比较和监视信息比较。从表 1 和表 2 可以得出 ADS- B 信息更新速度快、ACARS 信息丰富 的特点。
3 数据融合方法
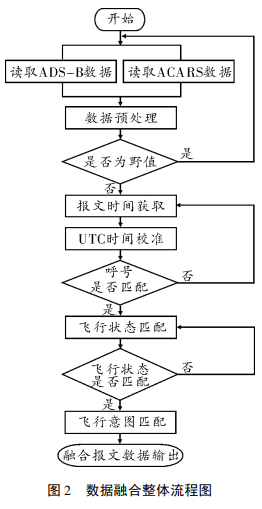
针对两种数据链路的特点,本文从数据的预处理、 时间校准、数据的关联匹配统一三方面进行了数据融 合。数据融合整体流程图,如图 2 所示。
3. 1 数据预处理
通过数据滤波将采集的数据预处理,可以增加数 据的可信度,提高目标的识别率,最终提高数据融合的 效率。在融合前首先滤波剔除错误点,消除其对后续计算的影响。本文采取 FX 相关处理常用的野值剔除 算法[11],以测量数据的均值代替真值,求取标准差,按 照正态分布理论如公式( 1) 所示:

当误差大于 3σ 的概率约为 0. 3% ,为小概率事 件。当该小概率时间发生的时候,就认为是野值,并将 其剔除。
3. 2 时间校准
时间校准是实现 ADS-B /ACARS 数据融合的关键 技术之一。因为 ADS- B 报文中没有 UTC 时间,只能 靠卫星给 ADS-B 设备单独授时,而 ACARS 设备中的 报文信息是含有 UTC 时间的。将两个数据链路的数 据融合,必须建立在同一时间上,否则融合后数据可用 性不高。基于此,本文从以下步骤对时间提取和校准。
接收一定数量的数据,将两种数据的 UTC 时间进 行对比,检测跟踪目标的时间一致性。具体校准方法 如下:
1) 读取 ADS-B 设备的 UTC 时间,当获取成功后, 记录下该时间。
2) 以上步骤中记录下来的 UTC 时间为搜索标识, 搜索 ACARS 设备报文中的 UTC 时间。当时间落入一 定时间域 Δt( Δt≤5 min) 时,认为时间匹配上。
3. 3 数据关联匹配
数据关联是 ADS-B /ACARS 信息融合的关键。在将 ADS-B 航迹和 ACARS 相关联时,把相关信息( 即 用来判断是否关联的信息) 划分为三类: 一类是标识信 息,即飞机的呼号信息; 另一类是飞机状态信息,包括 飞机的位置、高度、航向和时间信息; 第三类是飞机意 向信息,包含飞行计划信息、飞行意图信息。这三类中 标识信息,是数据融合的关键。
根据 ADS-B /ACARS 监视信息的特点,总结发现 ADS-B 信息是通过 24 位的 ICAO 地址来区分每条报 文的,而 ACARS 是通过飞机注册号来区分报文的。进 行数据匹配,必须进行标识信息的关联。系统从以下 三个方面进行了关联:
1) 对 ADS-B 航迹中某个航迹点的呼号和 ACARS 的呼号进行比较,如果两个呼号相同,则判断呼号关 联,否则判断为呼号不相关。由于相关信息还包含状 态和意图信息,此时还无法确定最终的相关性结论。
2) 呼号关联成功后,分别获取 ADS- B 和 ACARS 的状态信息,主要从经纬度、高度、航向、时间上进行比 较,状态的相关判断由状态相关系数 ρ 决定,其值由位 置相关系数 fph、时间相关系数 fsc、航向相关系数 ffx共 同设定[1]。
设相关判断次数为 m( m≥n) ,则 fph,fsc,ffx分别定 义为:
设 dn 为航迹点到飞行计划行路段的垂直距离,

其中,kph为常数项。
设 tn 为航迹点与飞行计划航迹上最近航路点的 时间差,

其中,ksc为常数项。
设 θf 为飞行计划航迹当前航向,θn 为航迹点当前 航向,

在上述任何一个相关系数计算出来后,如果结果 大于预定门限,则可直接判断状态关联失败; 否则按公 式( 5) 的方法计算状态相关系数 p,若 p 大于预设门 限,则仍然判断状态关联失败,否则判断状态关联成功。

最终,如果呼号相同并且通过上述判断方法确定 状态相关联,则确定该条 ADS- B 航迹与 ACARS 报文 相关; 如果呼号不同并且通过上述判断方法确定状态 也不相关联,则确定该条 ADS-B 航迹与 ACARS 不相关。
3) 当状态相关成功后,认为两数据链已经关联上,将 ADS-B 的意图变更的信息,ACARS 的飞行计划信 息、气象信息、OOOI 时间信息关联到信息报文中,输出 给用户界面。
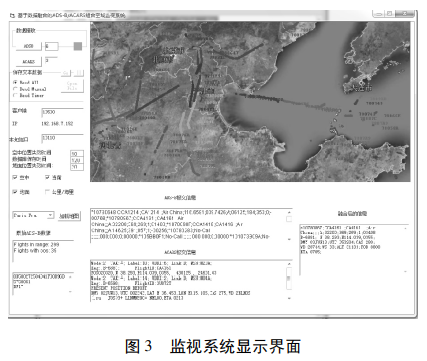
4 软件实现
实时接收天津滨海机场上空的 ADS-B /ACARS 数 据,采用 VB 编写程序对软件进行设计。主要包括数 据接收函数的设计、数据融合及分发设计、地图的显示 设计。具体监视系统图如图 3 所示。
4. 1 数据接收
ADS-B 地面站接口采用串口转 USB 接口模块,设 计波特率为 3M 来满足数据链信息传输速率。ACARS 地面站接口采用 232 串口接口模块,设计波特率为 115 200 来满足数据链路。利用 VB 调用系统串口控 件 MSComm,编写串口事件消息处理函数,实现大数据 量的接收。
4. 2 数据融合及分发
采用 3 节中的数据融合方法,编写数据野值剔除 函数、时间校准函数、呼号关联函数、状态关联函数,实 现数据融合。为达到数据共享的目的,调用 Winsock 控件,采用 UDP 定点广播的方式,为数据用户提供服务。
4. 3 地图显示
为能够直观显示空域监视状况,利用 VB 自带的 PictureBox 加载天津上空的 google 地图,采用不同的颜 色代表不同飞机的航迹,用飞机的 24 位 ICAO 地址码 标识每一条航迹。
5 结束语
空域监视技术是保障飞行安全、提高空管运行效 率的关键,是空中交通管制系统的核心。国内外对雷 达与 ADS-B 数据融合研究的较多,将 ACARS 数据融 合到监视系统中的较少。为了提高监视系统信息的丰 富性、精度,进一步提高空域监视能力,本文提出将 ADS-B 与 ACARS 两种数据源融合的思想,设计了数 据融合的方法; 采用 VB 编程实现了基于数据融合的 ADS-B /ACARS 组合空域监视系统。
参考文献:
[1] 张军. 空地协同的空域监视新技术[M]北京: 航空工业出 版社,2011.
[2] 阳宇. 多源相关监视雷达数据融合研究[D]. 成都: 电子 科技大学,2012.
[3] 孙沂,吴仁彪. 空管自动化系统的多雷达与 ADS- B 数据 融合技术综述[A]. 天津市电子学会、天津市仪器仪表学 会. 第二十五届中国( 天津) 2011'IT、网络、信息技术、电 子、仪器仪表创新学术会议论文集[C]. 天津市电子学 会、天津市仪器仪表学会,2011: 5.
[4] Baud O,Honor N,Taupin O. Radar/ADS- B data fusion architecture for experimentation purpose[C]. Proceedings of the 9th International Conference on Information Fusion. 2006: 1 - 6.
[5] 杨荣盛,程擎,罗军. 一种 ADS-B 和多雷达数据融合方案 研究[J]. 苏州科技学院学报( 工程技术版) ,2009,26 ( 4) : 58 - 61.
[6] Campbell S D,Grappel R D,Flavin J M. Multi- sensor processing for aircraft surveillance in mixed radar/ADS-B environments[C]. Proceedings of ESAV'08. 2008: 1 - 6.
[7] 何桂萍,徐亚军. ADS- B 数据链的比较及特性研究[J]. 中国民航飞行学院学报,2010,21( 4) : 3 - 6.
[8] 孙立新,陈亚青,刘国毅. ADS- B 空管监视系统误差分析 与研究[J]. 武汉理工大学学报( 交通科学与工程版) , 2011,35( 4) : 798 - 801.
[9] 袁 树 德,曹 力,邓 雪 云,等. 基 于 二 码 元 长 度 的 实 时 ACARS 信号分析算法[J]. 信息技术,2012,36 ( 7) : 6 - 10.
[10] 张昕. 飞机通信寻址报告系统( ACARS) 简介及常见故 障分析[J]. 江苏航空,2010,30( 1) : 41 - 42. [11] 路伟涛,杨文革,洪家财,等. FX 型相关处理方案及野值 剔除算法[J]. 中国空间科学技术,2012,32( 6) : 54 - 61.
上一篇:一种通用SDR平台的设计与实现
下一篇:没有了!
 售前咨询专员
售前咨询专员
